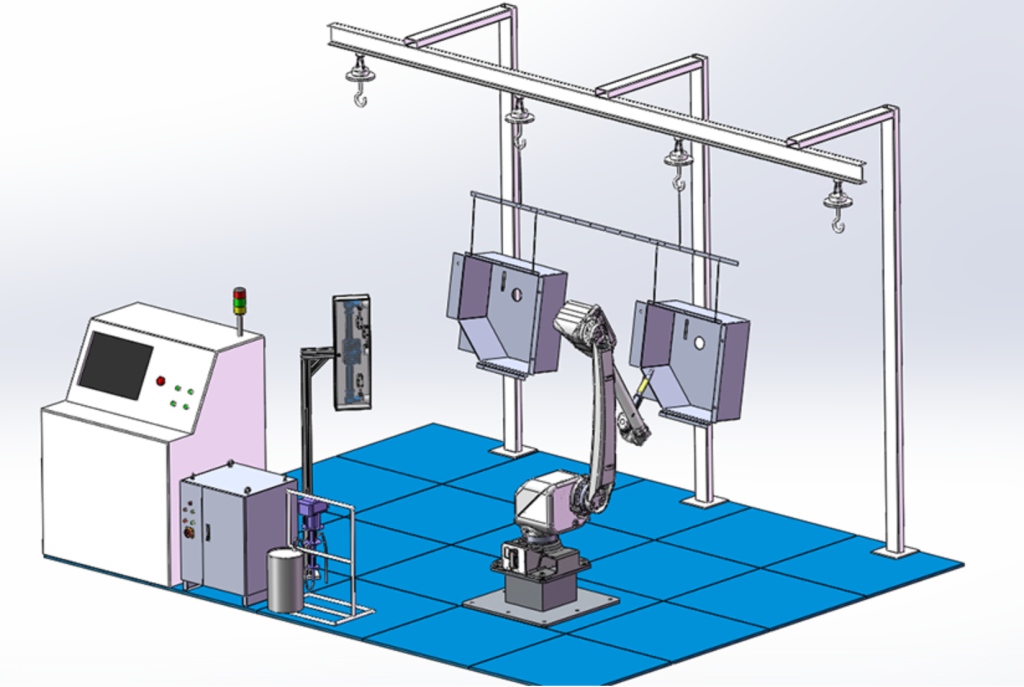
In traditional sheet metal powder coating lines, precise workpiece positioning is often compromised by conveyor oscillation and hooking inaccuracies. By integrating robotic sprayers with 3D vision systems, we enable real-time acquisition of workpiece geometry and spatial coordinates, effectively overcoming positioning challenges on overhead conveyors.